| ปริมาณ: | |
|---|---|








J52XU9734R-L31A
เป็นลม
พารามิเตอร์หลัก
| แบบอย่าง | j52xu9732G | J52xu9733Q | j52xu9734r | j52xu9735e | j52xu9736k |
| คู่เสา | 2 | 3 | 4 | 5 | 6 |
| แรงดันไฟฟ้าอินพุต | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS |
| ความถี่อินพุต | 10,000 Hz | 10,000 Hz | 10,000 Hz | 10,000 Hz | 10,000 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% |
| ความแม่นยำ | ≤± 60 ' | ≤± 40 ' | ≤± 30 ' | ≤± 25 ' | ≤± 20 ' |
| การเปลี่ยนเฟส | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1SEC | ||||
| ความต้านทานฉนวน | 250 MΩนาที | ||||
| เส้นผ่านศูนย์กลางด้านในของโรเตอร์ | 12.7 มม. | 12.7 มม. | 12.7 มม. | 12.7 มม. | 12.7 มม. |
| ลวดตัดขวาง | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² |
| ความเร็วในการหมุนสูงสุด | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที |
| ช่วงอุณหภูมิการทำงาน | -40 ℃ถึง +155 ℃ | ||||
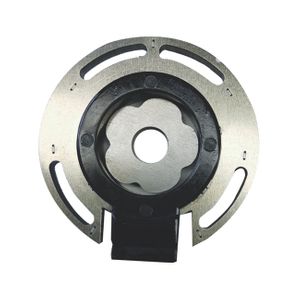
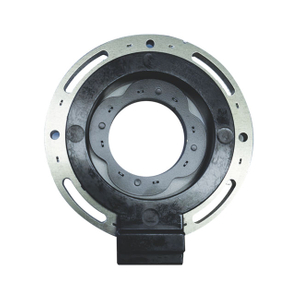
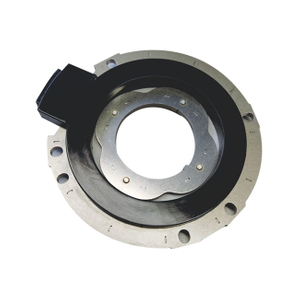
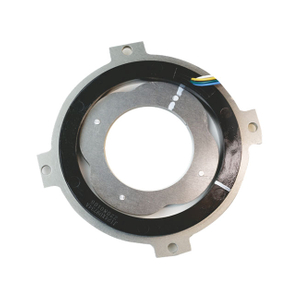
ส่วนประกอบและการกำหนดค่า
โดยทั่วไปแล้วสเตเตอร์จะจับจ้องไปที่ตัวเรือนท้ายของมอเตอร์ในขณะที่โรเตอร์ติดอยู่กับเพลาเอาท์พุทของมอเตอร์
ขดลวดสเตเตอร์มักจะมีเทอร์มินัลหกตัวโดยมีสองตัวที่อุทิศให้กับอินพุตสัญญาณกระตุ้นซึ่งเป็นสัญญาณไฟฟ้าไซน์ (10 kHz) ที่จัดทำโดยหน่วยควบคุมเพื่อให้กระแสการกระตุ้น
เทอร์มินัลที่เหลือทำหน้าที่เป็นขดลวดกลับซึ่งสร้างแรงไฟฟ้าที่เกิดขึ้นเมื่อมอเตอร์หมุนโดยทั่วไปจะผลิตซองสัญญาณไซน์และโคไซน์
หลักการทำงาน
เช่นเดียวกับหม้อแปลงทั่วไปตัวแปร Reluctance Resolver ทำงานตามการเหนี่ยวนำแม่เหล็กไฟฟ้า ความแตกต่างที่สำคัญอยู่ในตำแหน่งสัมพัทธ์ของตัวแปรของขดลวดหลักและทุติยภูมิที่เกี่ยวกับการกระจัดเชิงมุมของโรเตอร์ สิ่งนี้ส่งผลให้เกิดแรงดันไฟฟ้าเอาท์พุทที่เปลี่ยนแปลงตามมุมของโรเตอร์รักษาความสัมพันธ์การทำงานที่เฉพาะเจาะจง
การใช้งานในรถยนต์ไฟฟ้า
ตัวแก้ไขความไม่เต็มใจของตัวแปรถูกนำมาใช้กันอย่างแพร่หลายในยานพาหนะไฟฟ้าสำหรับการตรวจจับตำแหน่งและความเร็วในส่วนประกอบต่าง ๆ เช่น:
เซ็นเซอร์ตำแหน่งสำหรับมอเตอร์ไดรฟ์และเครื่องกำเนิดไฟฟ้า
เซ็นเซอร์ตำแหน่งสำหรับมอเตอร์พวงมาลัยเพาเวอร์ไฟฟ้า
การวัดมุมวาล์วเชื้อเพลิง
ข้อดี
ความสามารถในการประมวลผลที่ยอดเยี่ยมและการกระจัดญาติขนาดใหญ่
ความน่าเชื่อถือสูงและต้นทุนต่ำ
คุณลักษณะเหล่านี้ทำให้เหมาะอย่างยิ่งสำหรับยานพาหนะไฟฟ้า
พารามิเตอร์หลัก
| แบบอย่าง | j52xu9732G | J52xu9733Q | j52xu9734r | j52xu9735e | j52xu9736k |
| คู่เสา | 2 | 3 | 4 | 5 | 6 |
| แรงดันไฟฟ้าอินพุต | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS |
| ความถี่อินพุต | 10,000 Hz | 10,000 Hz | 10,000 Hz | 10,000 Hz | 10,000 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% |
| ความแม่นยำ | ≤± 60 ' | ≤± 40 ' | ≤± 30 ' | ≤± 25 ' | ≤± 20 ' |
| การเปลี่ยนเฟส | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° | ≤± 15 ° |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1SEC | ||||
| ความต้านทานฉนวน | 250 MΩนาที | ||||
| เส้นผ่านศูนย์กลางด้านในของโรเตอร์ | 12.7 มม. | 12.7 มม. | 12.7 มม. | 12.7 มม. | 12.7 มม. |
| ลวดตัดขวาง | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² |
| ความเร็วในการหมุนสูงสุด | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที | 30000 รอบต่อนาที |
| ช่วงอุณหภูมิการทำงาน | -40 ℃ถึง +155 ℃ | ||||
ส่วนประกอบและการกำหนดค่า
โดยทั่วไปแล้วสเตเตอร์จะจับจ้องไปที่ตัวเรือนท้ายของมอเตอร์ในขณะที่โรเตอร์ติดอยู่กับเพลาเอาท์พุทของมอเตอร์
ขดลวดสเตเตอร์มักจะมีเทอร์มินัลหกตัวโดยมีสองตัวที่อุทิศให้กับอินพุตสัญญาณกระตุ้นซึ่งเป็นสัญญาณไฟฟ้าไซน์ (10 kHz) ที่จัดทำโดยหน่วยควบคุมเพื่อให้กระแสการกระตุ้น
เทอร์มินัลที่เหลือทำหน้าที่เป็นขดลวดกลับซึ่งสร้างแรงไฟฟ้าที่เกิดขึ้นเมื่อมอเตอร์หมุนโดยทั่วไปจะผลิตซองสัญญาณไซน์และโคไซน์
หลักการทำงาน
เช่นเดียวกับหม้อแปลงทั่วไปตัวแปร Reluctance Resolver ทำงานตามการเหนี่ยวนำแม่เหล็กไฟฟ้า ความแตกต่างที่สำคัญอยู่ในตำแหน่งสัมพัทธ์ของตัวแปรของขดลวดหลักและทุติยภูมิที่เกี่ยวกับการกระจัดเชิงมุมของโรเตอร์ สิ่งนี้ส่งผลให้เกิดแรงดันไฟฟ้าเอาท์พุทที่เปลี่ยนแปลงตามมุมของโรเตอร์รักษาความสัมพันธ์การทำงานที่เฉพาะเจาะจง
การใช้งานในรถยนต์ไฟฟ้า
ตัวแก้ไขความไม่เต็มใจของตัวแปรถูกนำมาใช้กันอย่างแพร่หลายในยานพาหนะไฟฟ้าสำหรับการตรวจจับตำแหน่งและความเร็วในส่วนประกอบต่าง ๆ เช่น:
เซ็นเซอร์ตำแหน่งสำหรับมอเตอร์ไดรฟ์และเครื่องกำเนิดไฟฟ้า
เซ็นเซอร์ตำแหน่งสำหรับมอเตอร์พวงมาลัยเพาเวอร์ไฟฟ้า
การวัดมุมวาล์วเชื้อเพลิง
ข้อดี
ความสามารถในการประมวลผลที่ยอดเยี่ยมและการกระจัดญาติขนาดใหญ่
ความน่าเชื่อถือสูงและต้นทุนต่ำ
คุณลักษณะเหล่านี้ทำให้เหมาะอย่างยิ่งสำหรับยานพาหนะไฟฟ้า