| Množství: | |
|---|---|








J89XU9734
Větku
Hlavní parametry
| Model | J89XU9732 | J89XU9733 | J89XU9734 | J89XU9735 | J89XU9736 |
| Páry tyče | 2 | 3 | 4 | 5 | 6 |
| Vstupní napětí | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS |
| Vstupní frekvence | 10000 Hz | 10000 Hz | 10000 Hz | 10000 Hz | 10000 Hz |
| Poměr transformace | 0,286 ± 10% | 0,286 ± 10% | 0,286 ± 10% | 0,286 ± 10% | 0,286 ± 10% |
| Přesnost | ≤ ± 60 ' | ≤ ± 40 ' | ≤ ± 30 ' | ≤ ± 24 ' | ≤ ± 20 ' |
| Fázový posun | ≤ ± 15 ° | ≤ ± 15 ° | ≤ ± 15 ° | ≤ ± 15 ° | ≤ ± 15 ° |
| Dielektrická síla | AC 500 VRMS 1SEC | ||||
| Izolační odpor | 250 MΩ min | ||||
| Vnitřní průměr rotoru | 45 mm | 45 mm | 45 mm | 45 mm | 45 mm |
| Oblast průřezu drátu | 0,35 mm² | 0,35 mm² | 0,35 mm² | 0,35 mm² | 0,35 mm² |
| Maximální rychlost otáčení | 30000 ot / min | 30000 ot / min | 30000 ot / min | 30000 ot / min | 30000 ot / min |
| Provozní teplotní rozsah | -40 ℃ až +155 ℃ | ||||
Návrh a konstrukční poznatky
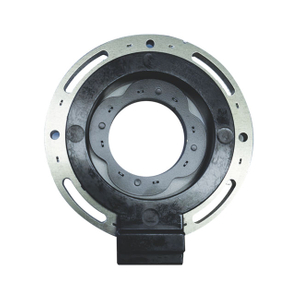
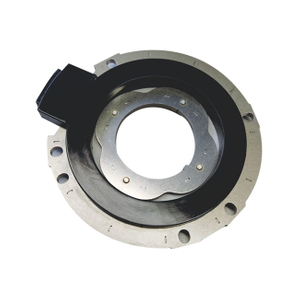
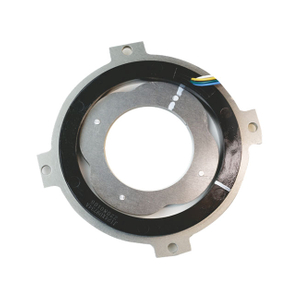
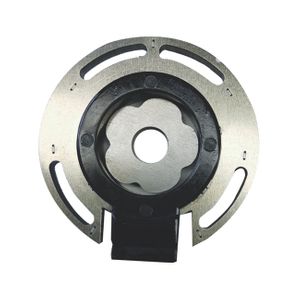
Konstrukce VRRS využívá koncept magnetické neochoty a zaměřuje se na interakci mezi feromagnetickým jádrem rotorovým a feromagnetickým jádrem rány statoru.
Zuby rotoru vytvářejí mezery vzduchu s jádrem statoru a jak se během rotace vyrovnávají, magnetická neochota se snižuje a zvyšuje hustotu toku.
Tato změna hustoty toku indukuje napětí ve vinutí statoru, což umožňuje stanovení úhlu rotoru.
Výhody
VRR jsou nezbytné pro jejich schopnost nabídnout spolehlivou metodu měření pohybu v rotujícím stroji.
Díky jejich robustnosti proti faktorům prostředí je perfektní pro tvrdé průmyslové nastavení.
Jednoduchost a náklady na VRR z nich činí preferovanou volbu v různých vysoce přesných aplikacích.
Aplikace
Rozhovovač s variabilní neochotou je obzvláště prospěšný pro aplikace HEV/EV, kde přesná poloha a snímání rychlosti jsou rozhodující pro efektivní řízení motoru a výkon vozidla.
Hlavní parametry
| Model | J89XU9732 | J89XU9733 | J89XU9734 | J89XU9735 | J89XU9736 |
| Páry tyče | 2 | 3 | 4 | 5 | 6 |
| Vstupní napětí | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS |
| Vstupní frekvence | 10000 Hz | 10000 Hz | 10000 Hz | 10000 Hz | 10000 Hz |
| Poměr transformace | 0,286 ± 10% | 0,286 ± 10% | 0,286 ± 10% | 0,286 ± 10% | 0,286 ± 10% |
| Přesnost | ≤ ± 60 ' | ≤ ± 40 ' | ≤ ± 30 ' | ≤ ± 24 ' | ≤ ± 20 ' |
| Fázový posun | ≤ ± 15 ° | ≤ ± 15 ° | ≤ ± 15 ° | ≤ ± 15 ° | ≤ ± 15 ° |
| Dielektrická síla | AC 500 VRMS 1SEC | ||||
| Izolační odpor | 250 MΩ min | ||||
| Vnitřní průměr rotoru | 45 mm | 45 mm | 45 mm | 45 mm | 45 mm |
| Oblast průřezu drátu | 0,35 mm² | 0,35 mm² | 0,35 mm² | 0,35 mm² | 0,35 mm² |
| Maximální rychlost otáčení | 30000 ot / min | 30000 ot / min | 30000 ot / min | 30000 ot / min | 30000 ot / min |
| Provozní teplotní rozsah | -40 ℃ až +155 ℃ | ||||
Návrh a konstrukční poznatky
Konstrukce VRRS využívá koncept magnetické neochoty a zaměřuje se na interakci mezi feromagnetickým jádrem rotorovým a feromagnetickým jádrem rány statoru.
Zuby rotoru vytvářejí mezery vzduchu s jádrem statoru a jak se během rotace vyrovnávají, magnetická neochota se snižuje a zvyšuje hustotu toku.
Tato změna hustoty toku indukuje napětí ve vinutí statoru, což umožňuje stanovení úhlu rotoru.
Výhody
VRR jsou nezbytné pro jejich schopnost nabídnout spolehlivou metodu měření pohybu v rotujícím stroji.
Díky jejich robustnosti proti faktorům prostředí je perfektní pro tvrdé průmyslové nastavení.
Jednoduchost a náklady na VRR z nich činí preferovanou volbu v různých vysoce přesných aplikacích.
Aplikace
Rozhovovač s variabilní neochotou je obzvláště prospěšný pro aplikace HEV/EV, kde přesná poloha a snímání rychlosti jsou rozhodující pro efektivní řízení motoru a výkon vozidla.