| ปริมาณ: | |
|---|---|








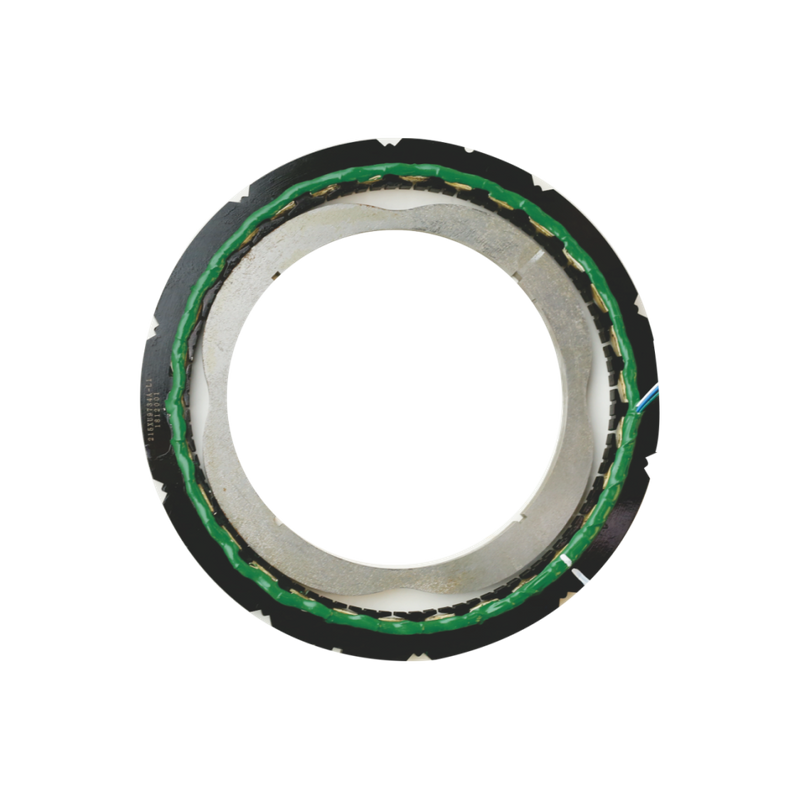
215xu973
เป็นลม
พารามิเตอร์หลัก
| แบบอย่าง | 215xu9734 | 215xu9736 | 215xu9738 | 215xu97312a |
| คู่เสา | 4 | 6 | 8 | 12 |
| แรงดันไฟฟ้าอินพุต | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS |
| ความถี่อินพุต | 10,000 Hz | 10,000 Hz | 10,000 Hz | 10,000 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% |
| ความแม่นยำ | ≤± 30 ' | ≤± 20 ' | ≤± 15 ' | ≤± 10 ' |
| การเปลี่ยนเฟส | ≤± 10 ° | ≤± 10 ° | ≤± 10 ° | ≤± 10 ° |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1SEC | |||
| ความต้านทานฉนวน | 250 MΩนาที | 250 MΩนาที | 250 MΩนาที | 250 MΩนาที |
| เส้นผ่านศูนย์กลางด้านในของโรเตอร์ | 145 มม. | 145 มม. | 130 มม. | 145 มม. |
| ลวดตัดขวาง | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² |
| ความเร็วในการหมุนสูงสุด | 30000 รอบต่อนาที | |||
| ช่วงอุณหภูมิการทำงาน | -40 ℃ถึง +155 ℃ | |||
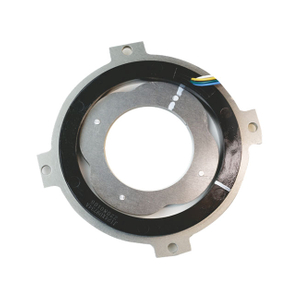
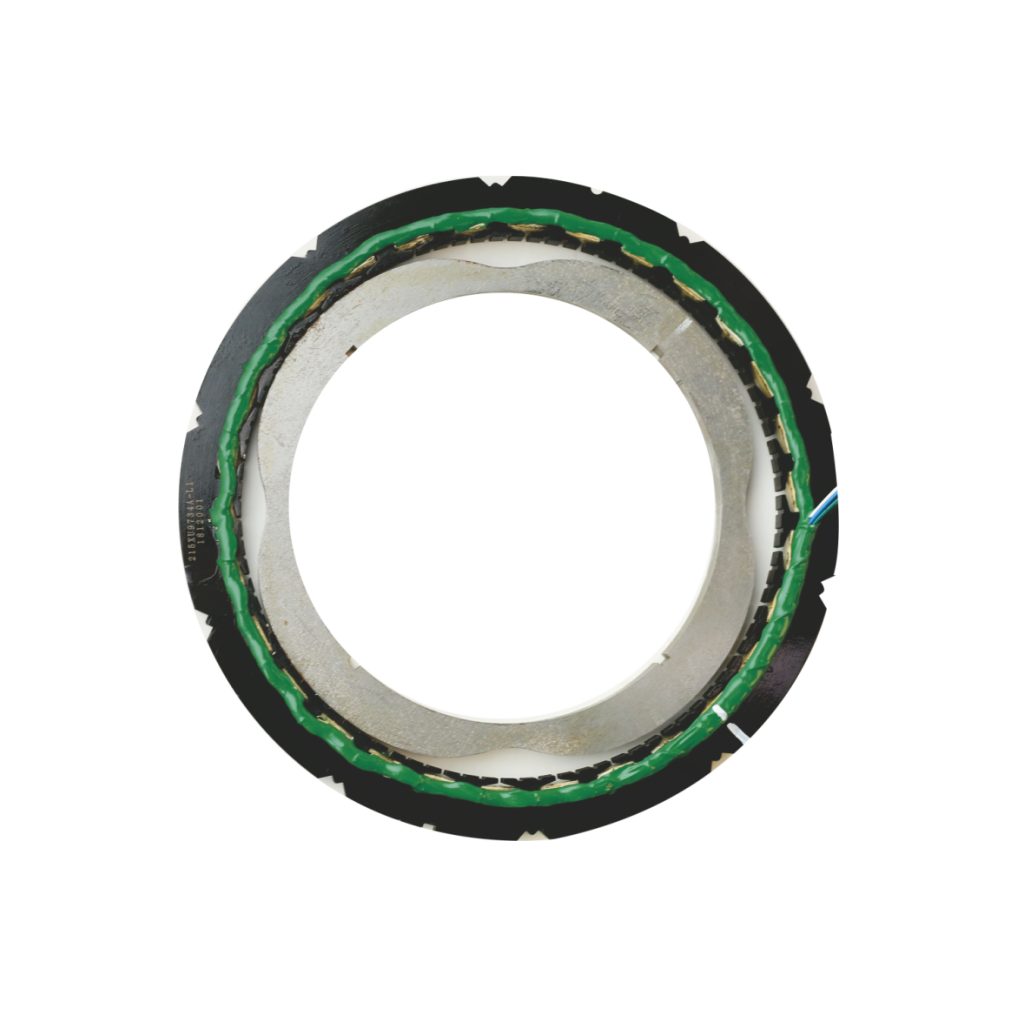
VR ตัวแก้ไขคืออะไร?
ตัวแก้ไข VR เป็นเซ็นเซอร์ตำแหน่งซึ่งสามารถตรวจจับตำแหน่งทิศทางและความเร็วของโรเตอร์ได้อย่างแม่นยำและใช้ในการตรวจจับทิศทางและความเร็วของมอเตอร์ขับเคลื่อนหรือเครื่องกำเนิดไฟฟ้า (พลังงานรีไซเคิล)
คุณสมบัติของ VR Resolvers
ตัวแก้ไข VR ถูกใช้ในมอเตอร์ขับเคลื่อนของยานพาหนะไฟฟ้าซึ่งเป็นรูปแบบพิเศษของตัวแก้ไขซึ่งใช้หลักการของ magnetoresistance เพื่อตระหนักถึงการแปลงระหว่างสัญญาณไฟฟ้า
โครงสร้างที่เรียบง่ายและขนาดที่เล็กมากของพื้นที่ที่ถูกครอบครองนั้นทั้งหมดได้รับการแก้ไขบนเวทีสเตเตอร์และการกระตุ้นที่คดเคี้ยว, ม้วนไซน์และขดลวดโคไซน์ได้รับการแก้ไข
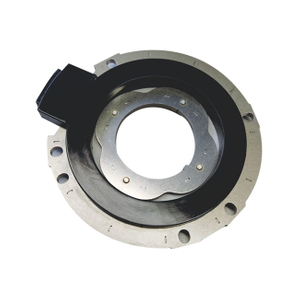
ขดลวดของด้านหลักและรองจะถูกวางไว้ในช่องต่าง ๆ ของสเตเตอร์ของมอเตอร์และพวกเขาจะได้รับการแก้ไขโดยไม่ต้องหมุน การขดลวดหลักคือการกระตุ้นที่คดเคี้ยวด้วยกระแสการกระตุ้นแบบไซนัสในขณะที่ด้านรองคือขดลวดสองเฟสที่สร้างสัญญาณเอาต์พุต
โครงสร้างที่ไม่มีแปรงช่วยปรับปรุงความน่าเชื่อถือของระบบอย่างมากและความสามารถในการต่อต้านการแทรกแซงนั้นดีกว่าซึ่งเหมาะสำหรับความต้องการต่าง ๆ ของยานพาหนะสำหรับมอเตอร์ไดรฟ์
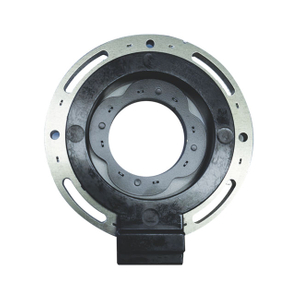
หลักการทำงาน
หลังจากขดลวดกระตุ้นถูกส่งผ่านไปยังแรงดันไฟฟ้ากระตุ้นของเส้นโค้งไซนัสท. สนามแม่เหล็กสลับที่สร้างขึ้นรอบ ๆ ขดลวดกระตุ้นจะทำหน้าที่บนดิสก์โรเตอร์และดิสก์โรเตอร์นำฟลักซ์แม่เหล็กของสนามแม่เหล็กสลับไปยังขดลวดที่ได้รับ แรงดันไฟฟ้า
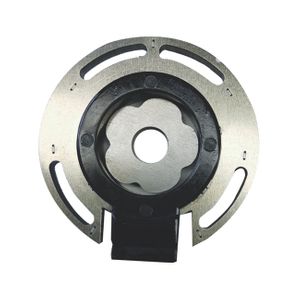
กลยุทธ์การควบคุมสำหรับตัวแก้ไข VR
เมื่อมอเตอร์โรเตอร์และโรเตอร์ตัวแก้ไขหมุนเข้าด้วยกันโรเตอร์ตัวแก้ไขจะหมุนผ่านขดลวดสเตเตอร์ซึ่งเปลี่ยนการไหลของแม่เหล็กระหว่างขดลวดสเตเตอร์และโรเตอร์เพื่อให้ขดลวดไซนัสและขดลวดโคไซน์ แอมพลิจูดและเฟสของการเปลี่ยนแปลงรูปคลื่นเมื่อมีการเปลี่ยนแปลงของใบพัดตัวแก้ไข (ซึ่งหมุนในเวลาเดียวกันกับโรเตอร์มอเตอร์) ดังนั้นตำแหน่งความเร็วและทิศทางของโรเตอร์มอเตอร์สามารถกำหนดได้อย่างถูกต้อง
พารามิเตอร์หลัก
| แบบอย่าง | 215xu9734 | 215xu9736 | 215xu9738 | 215xu97312a |
| คู่เสา | 4 | 6 | 8 | 12 |
| แรงดันไฟฟ้าอินพุต | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS |
| ความถี่อินพุต | 10,000 Hz | 10,000 Hz | 10,000 Hz | 10,000 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% |
| ความแม่นยำ | ≤± 30 ' | ≤± 20 ' | ≤± 15 ' | ≤± 10 ' |
| การเปลี่ยนเฟส | ≤± 10 ° | ≤± 10 ° | ≤± 10 ° | ≤± 10 ° |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1SEC | |||
| ความต้านทานฉนวน | 250 MΩนาที | 250 MΩนาที | 250 MΩนาที | 250 MΩนาที |
| เส้นผ่านศูนย์กลางด้านในของโรเตอร์ | 145 มม. | 145 มม. | 130 มม. | 145 มม. |
| ลวดตัดขวาง | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² | 0.35 มม. ² |
| ความเร็วในการหมุนสูงสุด | 30000 รอบต่อนาที | |||
| ช่วงอุณหภูมิการทำงาน | -40 ℃ถึง +155 ℃ | |||
VR ตัวแก้ไขคืออะไร?
ตัวแก้ไข VR เป็นเซ็นเซอร์ตำแหน่งซึ่งสามารถตรวจจับตำแหน่งทิศทางและความเร็วของโรเตอร์ได้อย่างแม่นยำและใช้ในการตรวจจับทิศทางและความเร็วของมอเตอร์ขับเคลื่อนหรือเครื่องกำเนิดไฟฟ้า (พลังงานรีไซเคิล)
คุณสมบัติของ VR Resolvers
ตัวแก้ไข VR ถูกใช้ในมอเตอร์ขับเคลื่อนของยานพาหนะไฟฟ้าซึ่งเป็นรูปแบบพิเศษของตัวแก้ไขซึ่งใช้หลักการของ magnetoresistance เพื่อตระหนักถึงการแปลงระหว่างสัญญาณไฟฟ้า
โครงสร้างที่เรียบง่ายและขนาดที่เล็กมากของพื้นที่ที่ถูกครอบครองนั้นทั้งหมดได้รับการแก้ไขบนเวทีสเตเตอร์และการกระตุ้นที่คดเคี้ยว, ม้วนไซน์และขดลวดโคไซน์ได้รับการแก้ไข
ขดลวดของด้านหลักและรองจะถูกวางไว้ในช่องต่าง ๆ ของสเตเตอร์ของมอเตอร์และพวกเขาจะได้รับการแก้ไขโดยไม่ต้องหมุน การขดลวดหลักคือการกระตุ้นที่คดเคี้ยวด้วยกระแสการกระตุ้นแบบไซนัสในขณะที่ด้านรองคือขดลวดสองเฟสที่สร้างสัญญาณเอาต์พุต
โครงสร้างที่ไม่มีแปรงช่วยปรับปรุงความน่าเชื่อถือของระบบอย่างมากและความสามารถในการต่อต้านการแทรกแซงนั้นดีกว่าซึ่งเหมาะสำหรับความต้องการต่าง ๆ ของยานพาหนะสำหรับมอเตอร์ไดรฟ์
หลักการทำงาน
หลังจากขดลวดกระตุ้นถูกส่งผ่านไปยังแรงดันไฟฟ้ากระตุ้นของเส้นโค้งไซนัสท. สนามแม่เหล็กสลับที่สร้างขึ้นรอบ ๆ ขดลวดกระตุ้นจะทำหน้าที่บนดิสก์โรเตอร์และดิสก์โรเตอร์นำฟลักซ์แม่เหล็กของสนามแม่เหล็กสลับไปยังขดลวดที่ได้รับ แรงดันไฟฟ้า
กลยุทธ์การควบคุมสำหรับตัวแก้ไข VR
เมื่อมอเตอร์โรเตอร์และโรเตอร์ตัวแก้ไขหมุนเข้าด้วยกันโรเตอร์ตัวแก้ไขจะหมุนผ่านขดลวดสเตเตอร์ซึ่งเปลี่ยนการไหลของแม่เหล็กระหว่างขดลวดสเตเตอร์และโรเตอร์เพื่อให้ขดลวดไซนัสและขดลวดโคไซน์ แอมพลิจูดและเฟสของการเปลี่ยนแปลงรูปคลื่นเมื่อการเปลี่ยนแปลงของใบพัดตัวแก้ไข (ซึ่งหมุนในเวลาเดียวกันกับโรเตอร์มอเตอร์) ดังนั้นตำแหน่งความเร็วและทิศทางของโรเตอร์มอเตอร์สามารถกำหนดได้อย่างถูกต้อง