T: +86 - 15800900153
E: [email protected]: CN
E: [email protected]: CN
No.1230, Beiwu Road, Minhang թաղամաս, Շանհայ, Չինաստան
| Քանակ: | |
|---|---|








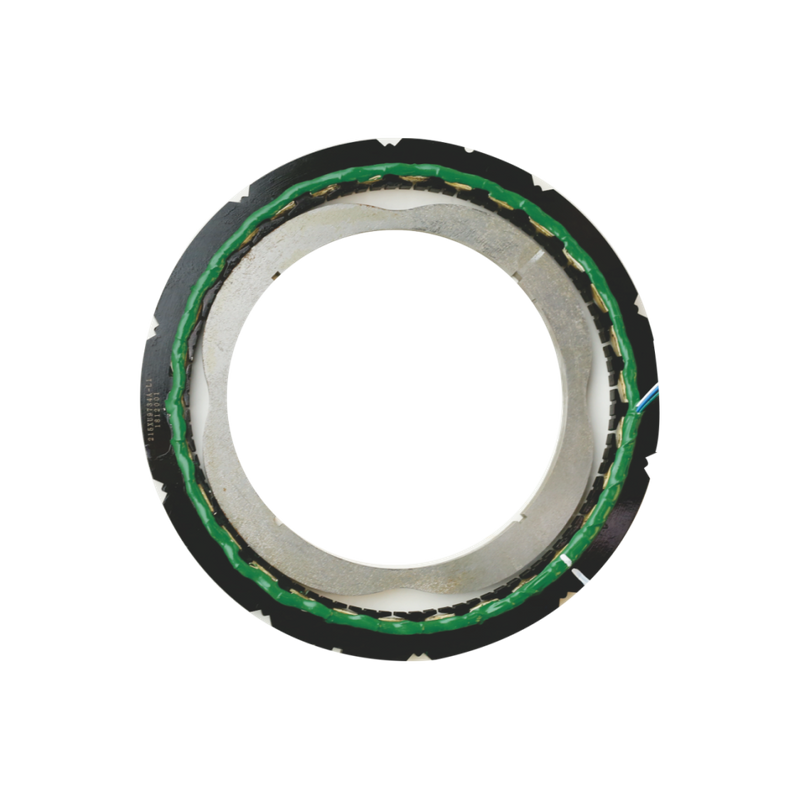
215xu973
Դանդաղ
Հիմնական պարամետրեր
| Մոդել | 215xu9734 | 215xu9736 | 215xu9738 | 215xu97312a |
| Բեւեռային զույգեր | 4 | 6 | 8 | 12 |
| Մուտքային լարումը | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS |
| Մուտքային հաճախականությունը | 10000 Հց | 10000 Հց | 10000 Հց | 10000 Հց |
| Փոխակերպման հարաբերակցությունը | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% |
| Ճշգրտություն | ≤ ± 30 ' | ≤ ± 20 ' | ≤ ± 15 ' | ≤ ± 10 ' |
| Փուլային հերթափոխ | ≤ ± 10 ° | ≤ ± 10 ° | ≤ ± 10 ° | ≤ ± 10 ° |
| Դիէլեկտրական ուժ | AC 500 VRMS 1SEC | |||
| Մեկուսացման դիմադրություն | 250 մ րոպե | 250 մ րոպե | 250 մ րոպե | 250 մ րոպե |
| Rotor ներքին տրամագիծը | 145 մմ | 145 մմ | 130 մմ | 145 մմ |
| Wire Cross հատվածային տարածք | 0,35 մմ մ | 0,35 մմ մ | 0,35 մմ մ | 0,35 մմ մ |
| Պտտվող առավելագույն արագությունը | 30000 RPM | |||
| Գործառնական ջերմաստիճանի տիրույթ | -40 ℃ to + 155 ℃ | |||
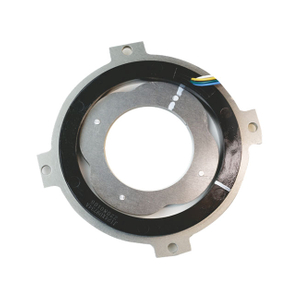
Ինչ է VR լուծիչը:
VR READER- ը դիրքի ցուցիչ է, որը կարող է ճշգրիտ հայտնաբերել ռոտորի դիրքը, ուղղությունը եւ արագությունը եւ օգտագործվում է Drive շարժիչի կամ գեներատորի ուղղությունն ու արագությունը հայտնաբերելու համար (վերամշակված էներգիա):
VR լուծողների առանձնահատկությունները
VR լուծիչը օգտագործվում է էլեկտրական տրանսպորտային միջոցների շարժիչ շարժիչում, որը լուծողի հատուկ ձեւ է, որն օգտագործում է մագնիսականության սկզբունքը `էլեկտրական ազդանշանների միջեւ փոխարկումը կյանքի կոչելու համար:
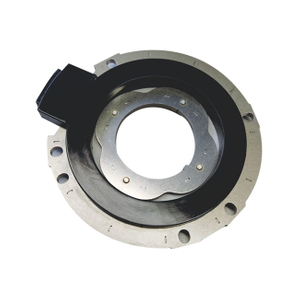
Զբաղված տարածքի պարզ կառուցվածքը եւ ծայրաստիճան փոքր չափը բոլորն ամրագրված են Ստատիկ փուլում, եւ հուզիչ ոլորուն, սինին ոլորուն եւ կոսնձե ոլորուն են:
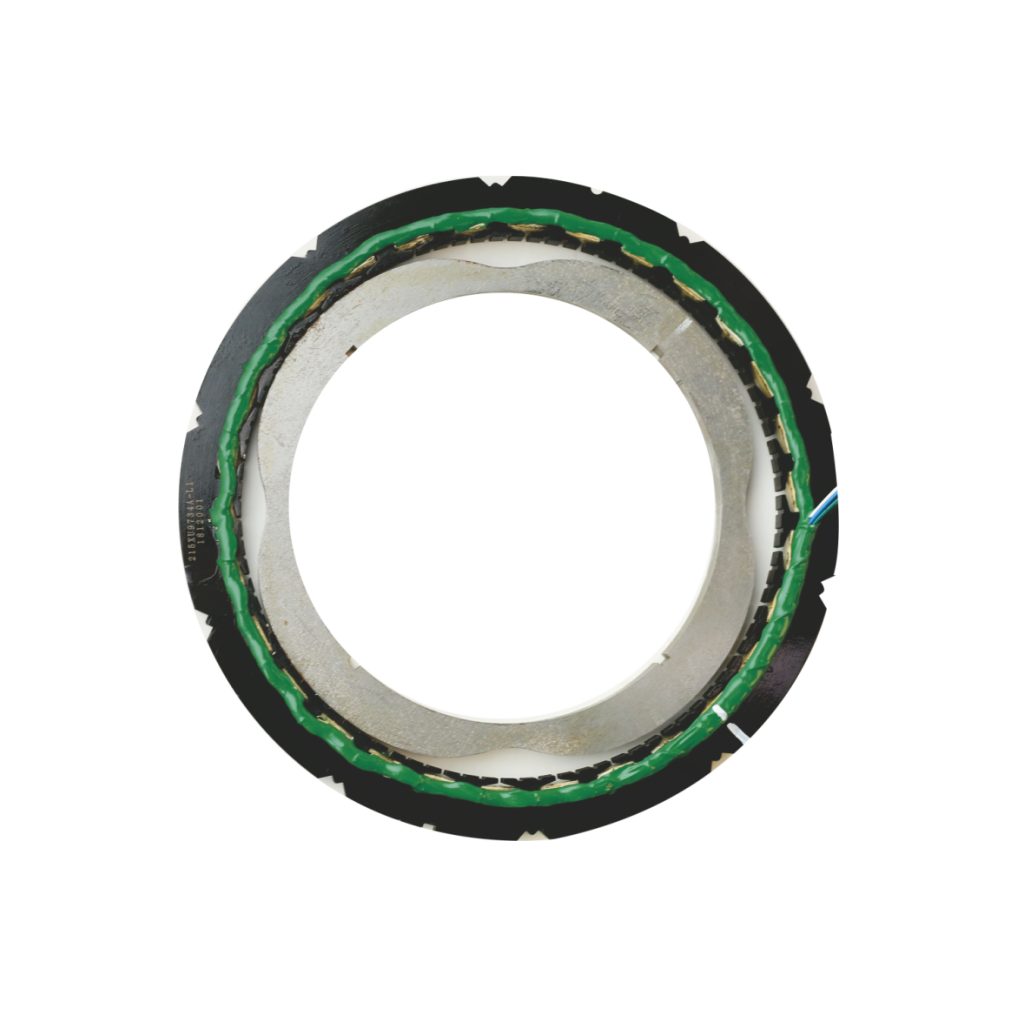
Առաջնային եւ երկրորդական կողմերի ոլորուները տեղադրված են շարժիչի ստատորի տարբեր անցքերում, եւ դրանք ամրագրված են առանց պտտվելու: Առաջնային ոլորունը հուզիչ ոլորուն է `սինուսոիդային հուզմունքով հոսանքով, մինչդեռ երկրորդական կողմը երկկողմանի կծիկ է, որն առաջացնում է ելքային ազդանշան:
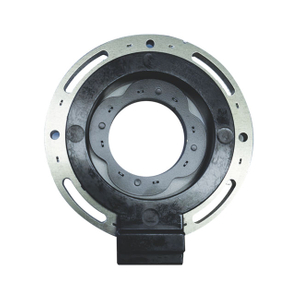
Խոզանակի կառուցվածքը մեծապես բարելավում է համակարգի հուսալիությունը, եւ հակամրցակցային կարողությունն ավելի լավ է, ինչը ավելի հարմար է մեքենայի տարբեր պահանջների համար:
Աշխատանքային սկզբունք
Հետաքրքրաշարժ կծիկից հետո անցնում է սինուսոիդային կորի հուզիչ լարման, ռոտորային սկավառակի վրա առաջացած հուզիչ միջոցը գործում է այլընտրանքային մագնիսական դաշտը, եւ ռոտորային սկավառակը ուղղում է այլընտրանքային մագնիսական դաշտի մագնիսական հոսքը:
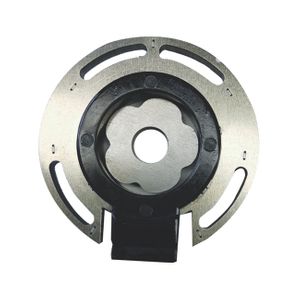
Վերահսկիչ ռազմավարություններ VR լուծողների համար
Երբ շարժիչային ռոտորը եւ լուծիչը պտտվում են միասին, լուծիչը պտտվում է վիճակագրության կծիկի միջով, որը փոխում է մագնիսական հոսքը Ստատիկ կծիկի եւ ռոտորի միջեւ: Ալիքի ձեւավորման ամպլիտուդն ու փուլը փոխվում են լուծողի ռոտորի փոփոխությամբ (որը պտտվում է միաժամանակ շարժիչի ռոտոր), ուստի շարժիչային ռոտորի դիրքը, արագությունը եւ ուղղությունը կարող են ճշգրիտ որոշվել:
Հիմնական պարամետրեր
| Մոդել | 215xu9734 | 215xu9736 | 215xu9738 | 215xu97312a |
| Բեւեռային զույգեր | 4 | 6 | 8 | 12 |
| Մուտքային լարումը | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS | AC 7 VRMS |
| Մուտքային հաճախականությունը | 10000 Հց | 10000 Հց | 10000 Հց | 10000 Հց |
| Փոխակերպման հարաբերակցությունը | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% | 0.286 ± 10% |
| Ճշգրտություն | ≤ ± 30 ' | ≤ ± 20 ' | ≤ ± 15 ' | ≤ ± 10 ' |
| Փուլային հերթափոխ | ≤ ± 10 ° | ≤ ± 10 ° | ≤ ± 10 ° | ≤ ± 10 ° |
| Դիէլեկտրական ուժ | AC 500 VRMS 1SEC | |||
| Մեկուսացման դիմադրություն | 250 մ րոպե | 250 մ րոպե | 250 մ րոպե | 250 մ րոպե |
| Rotor ներքին տրամագիծը | 145 մմ | 145 մմ | 130 մմ | 145 մմ |
| Wire Cross հատվածային տարածք | 0,35 մմ մ | 0,35 մմ մ | 0,35 մմ մ | 0,35 մմ մ |
| Պտտվող առավելագույն արագությունը | 30000 RPM | |||
| Գործառնական ջերմաստիճանի տիրույթ | -40 ℃ to + 155 ℃ | |||
Ինչ է VR լուծիչը:
VR READER- ը դիրքի ցուցիչ է, որը կարող է ճշգրիտ հայտնաբերել ռոտորի դիրքը, ուղղությունը եւ արագությունը եւ օգտագործվում է Drive շարժիչի կամ գեներատորի ուղղությունն ու արագությունը հայտնաբերելու համար (վերամշակված էներգիա):
VR լուծողների առանձնահատկությունները
VR լուծիչը օգտագործվում է էլեկտրական տրանսպորտային միջոցների շարժիչ շարժիչում, որը լուծողի հատուկ ձեւ է, որն օգտագործում է մագնիսականության սկզբունքը `էլեկտրական ազդանշանների միջեւ փոխարկումը կյանքի կոչելու համար:
Զբաղված տարածքի պարզ կառուցվածքը եւ ծայրաստիճան փոքր չափը բոլորն ամրագրված են Ստատիկ փուլում, եւ հուզիչ ոլորուն, սինին ոլորուն եւ կոսնձե ոլորուն են:
Առաջնային եւ երկրորդական կողմերի ոլորուները տեղադրված են շարժիչի ստատորի տարբեր անցքերում, եւ դրանք ամրագրված են առանց պտտվելու: Առաջնային ոլորունը հուզիչ ոլորուն է `սինուսոիդային հուզմունքով հոսանքով, մինչդեռ երկրորդական կողմը երկկողմանի կծիկ է, որն առաջացնում է ելքային ազդանշան:
Խոզանակի կառուցվածքը մեծապես բարելավում է համակարգի հուսալիությունը, եւ հակամրցակցային կարողությունն ավելի լավ է, ինչը ավելի հարմար է մեքենայի տարբեր պահանջների համար:
Աշխատանքային սկզբունք
Հետաքրքրաշարժ կծիկից հետո անցնում է սինուսոիդային կորի հուզիչ լարման, ռոտորային սկավառակի վրա առաջացած հուզիչ միջոցը գործում է այլընտրանքային մագնիսական դաշտը, եւ ռոտորային սկավառակը ուղղում է այլընտրանքային մագնիսական դաշտի մագնիսական հոսքը:
Վերահսկիչ ռազմավարություններ VR լուծողների համար
Երբ շարժիչային ռոտորը եւ լուծիչը պտտվում են միասին, լուծիչը պտտվում է վիճակագրության կծիկի միջով, որը փոխում է մագնիսական հոսքը Ստատիկ կծիկի եւ ռոտորի միջեւ: Ալիքի ձեւավորման ամպլիտուդն ու փուլը փոխվում են լուծողի ռոտորի փոփոխությամբ (որը պտտվում է միաժամանակ շարժիչի ռոտոր), ուստի շարժիչային ռոտորի դիրքը, արագությունը եւ ուղղությունը կարող են ճշգրիտ որոշվել: