
| ปริมาณ: | |
|---|---|








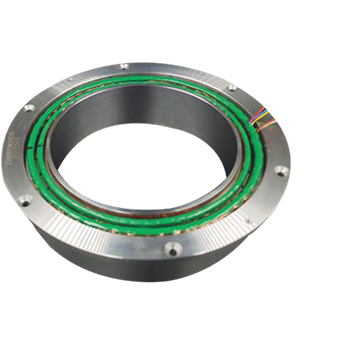
J106XFS02658
เป็นลม
พารามิเตอร์หลัก
| แบบอย่าง | J106XFS02658 |
| คู่เสา | 1: 8 |
| แรงดันไฟฟ้าอินพุต | AC 26 VRMS |
| ความถี่อินพุต | 400 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.461 ± 10% |
| ความแม่นยำ (ของ Resolver หยาบ) | สูงสุด± 30 ' |
| ความแม่นยำ (ของตัวแก้ไขที่ดี) | ± 1 'สูงสุด |
| การเปลี่ยนเฟส (ของตัวแก้ไขหยาบ) | 8 °± 3 ° |
| การเปลี่ยนเฟส (ของตัวแก้ไขที่ดี) | 30 °± 3 ° |
| อินพุตอิมพีแดนซ์ (ของตัวแก้ไขหยาบ) | (3270 ± 491) Ω |
| อินพุตอิมพีแดนซ์ (ของตัวแก้ไขที่ดี) | (390 ± 59) Ω |
| อิมพีแดนซ์เอาท์พุท (ของตัวแก้ไขหยาบ) | (1100 ± 165) Ω |
| ความต้านทานเอาท์พุท (ของตัวแก้ไขที่ดี) | (240 ± 36) Ω |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1 นาที |
| ความต้านทานฉนวน | 250 MΩนาที |
| ความเร็วในการหมุนสูงสุด | 750 รอบต่อนาที |
| ช่วงอุณหภูมิการทำงาน | -55 ℃ถึง +155 ℃ |
หลักการทำงาน
ตัวแก้ไขเป็นเซ็นเซอร์ที่ใช้ในการวัดการกระจัดเชิงมุมระหว่างโรเตอร์และสเตเตอร์ของมอเตอร์ มันประกอบด้วยสเตเตอร์ที่มีขดลวดกระตุ้นและขดลวดความคิดเห็นจากไซน์-คอซีนและโรเตอร์ที่ทำจากเหล็กซิลิกอนลามิเนต โรเตอร์ของตัวแก้ไขคือโคแอกเซียลกับโรเตอร์ของมอเตอร์ เมื่อมีการใช้สัญญาณการกระตุ้นแบบไซนัสโรเตอร์หมุนจะเปลี่ยนความลังเลของสนามแม่เหล็กของวงจรแม่เหล็กซึ่งจะส่งผลกระทบต่อความกว้างของสัญญาณตอบรับจากขดลวดไซน์-คอซีน ข้อมูลมุมที่มีอยู่ในสัญญาณเหล่านี้จะถูกสกัดซึ่งเป็นหลักการที่อยู่เบื้องหลังการวัดมุมของตัวแก้ไข
การเลือกแบบจำลอง
คู่ขั้วโลกมักจะเลือกให้ตรงกับจำนวนคู่ขั้วของมอเตอร์ สิ่งนี้ทำให้มั่นใจได้ว่ามุมไฟฟ้าที่วัดได้ไม่จำเป็นต้องมีการแปลงสำหรับการแปลงพิกัดของอินเวอร์เตอร์
อย่างไรก็ตามหากการวัดข้อผิดพลาดมุมไฟฟ้าตรงตามข้อกำหนดก็เป็นไปได้ที่จะใช้คู่ขั้วโลกที่ไม่ตรงกัน ตัวอย่างเช่นหากมอเตอร์มีคู่ขั้ว 4 คู่และตัวแก้ไขมี 2 ขั้วคู่เมื่อตัวแก้ไขหมุนมุมไฟฟ้า 90 °มุมไฟฟ้าที่สอดคล้องกันสำหรับมอเตอร์คือ 180 °และในทางกลับกัน
ในทางทฤษฎียิ่งจำนวนคู่ของขั้วโลกสูงเท่าไหร่ก็ยิ่งมีข้อผิดพลาดทางไฟฟ้ามากขึ้น เมื่อตัวแก้ไขมีคู่เสามากกว่ามอเตอร์ต้องพิจารณาความถี่มุมไฟฟ้าสูงสุด ในที่สุดผู้แก้ไขจะต้องใช้กับชิปถอดรหัส หากความถี่มุมไฟฟ้าสูงเกินไประบบลำดับที่สองอาจไม่สามารถติดตามได้ทำให้เป็นไปไม่ได้ที่จะแก้ไขมุม
พารามิเตอร์หลัก
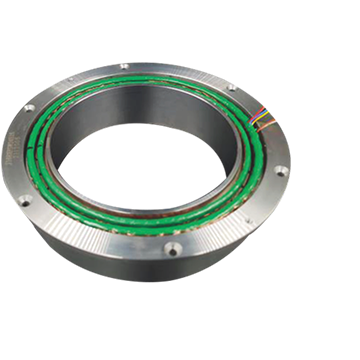
| แบบอย่าง | J106XFS02658 |
| คู่เสา | 1: 8 |
| แรงดันไฟฟ้าอินพุต | AC 26 VRMS |
| ความถี่อินพุต | 400 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.461 ± 10% |
| ความแม่นยำ (ของ Resolver หยาบ) | สูงสุด± 30 ' |
| ความแม่นยำ (ของตัวแก้ไขที่ดี) | ± 1 'สูงสุด |
| การเปลี่ยนเฟส (ของตัวแก้ไขหยาบ) | 8 °± 3 ° |
| การเปลี่ยนเฟส (ของตัวแก้ไขที่ดี) | 30 °± 3 ° |
| อินพุตอิมพีแดนซ์ (ของตัวแก้ไขหยาบ) | (3270 ± 491) Ω |
| อินพุตอิมพีแดนซ์ (ของตัวแก้ไขที่ดี) | (390 ± 59) Ω |
| อิมพีแดนซ์เอาท์พุท (ของตัวแก้ไขหยาบ) | (1100 ± 165) Ω |
| ความต้านทานเอาท์พุท (ของตัวแก้ไขที่ดี) | (240 ± 36) Ω |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1 นาที |
| ความต้านทานฉนวน | 250 MΩนาที |
| ความเร็วในการหมุนสูงสุด | 750 รอบต่อนาที |
| ช่วงอุณหภูมิการทำงาน | -55 ℃ถึง +155 ℃ |
หลักการทำงาน
ตัวแก้ไขเป็นเซ็นเซอร์ที่ใช้ในการวัดการกระจัดเชิงมุมระหว่างโรเตอร์และสเตเตอร์ของมอเตอร์ มันประกอบด้วยสเตเตอร์ที่มีขดลวดกระตุ้นและขดลวดความคิดเห็นจากไซน์-คอซีนและโรเตอร์ที่ทำจากเหล็กซิลิกอนลามิเนต โรเตอร์ของตัวแก้ไขคือโคแอกเซียลกับโรเตอร์ของมอเตอร์ เมื่อมีการใช้สัญญาณการกระตุ้นแบบไซนัสโรเตอร์หมุนจะเปลี่ยนความลังเลของสนามแม่เหล็กของวงจรแม่เหล็กซึ่งจะส่งผลกระทบต่อความกว้างของสัญญาณตอบรับจากขดลวดไซน์-คอซีน ข้อมูลมุมที่มีอยู่ในสัญญาณเหล่านี้จะถูกสกัดซึ่งเป็นหลักการที่อยู่เบื้องหลังการวัดมุมของตัวแก้ไข
การเลือกแบบจำลอง
คู่ขั้วโลกมักจะเลือกให้ตรงกับจำนวนคู่ขั้วของมอเตอร์ สิ่งนี้ทำให้มั่นใจได้ว่ามุมไฟฟ้าที่วัดได้ไม่จำเป็นต้องมีการแปลงสำหรับการแปลงพิกัดของอินเวอร์เตอร์
อย่างไรก็ตามหากการวัดข้อผิดพลาดมุมไฟฟ้าตรงตามข้อกำหนดก็เป็นไปได้ที่จะใช้คู่ขั้วโลกที่ไม่ตรงกัน ตัวอย่างเช่นหากมอเตอร์มีคู่ขั้ว 4 คู่และตัวแก้ไขมี 2 ขั้วคู่เมื่อตัวแก้ไขหมุนมุมไฟฟ้า 90 °มุมไฟฟ้าที่สอดคล้องกันสำหรับมอเตอร์คือ 180 °และในทางกลับกัน
ในทางทฤษฎียิ่งจำนวนคู่ของขั้วโลกสูงเท่าไหร่ก็ยิ่งมีข้อผิดพลาดทางไฟฟ้ามากขึ้น เมื่อตัวแก้ไขมีคู่เสามากกว่ามอเตอร์ต้องพิจารณาความถี่มุมไฟฟ้าสูงสุด ในที่สุดผู้แก้ไขจะต้องใช้กับชิปถอดรหัส หากความถี่มุมไฟฟ้าสูงเกินไประบบลำดับที่สองอาจไม่สามารถติดตามได้ทำให้เป็นไปไม่ได้ที่จะแก้ไขมุม




