| ปริมาณ: | |
|---|---|








J36XFW975M
เป็นลม
พารามิเตอร์หลัก
| แบบอย่าง | J36XFW975M |
| คู่เสา | 1 |
| แรงดันไฟฟ้าอินพุต | AC 7 VRMS |
| ความถี่อินพุต | 10,000 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.5 ± 10% |
| ความแม่นยำ | สูงสุด± 10 ' |
| การเปลี่ยนเฟส | 0 °± 5 ° |
| ความต้านทานอินพุต | (120 ± 24) Ω |
| ความต้านทานเอาท์พุท | (350 ± 70) Ω |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1 นาที |
| ความต้านทานฉนวน | 250 MΩนาที |
| ความเร็วในการหมุนสูงสุด | 2543 รอบต่อนาที |
| ช่วงอุณหภูมิการทำงาน | -55 ℃ถึง +155 ℃ |
หลักการทำงาน
brushless resolver: ตำแหน่งมุมของโรเตอร์คำนวณโดยการเปลี่ยนตำแหน่งสัมพัทธ์ระหว่างการคดเคี้ยวของสัญญาณโรเตอร์และการขดลวดกระตุ้นของสเตเตอร์ หลักการทำงานของมันคือการใช้สนามแม่เหล็กที่เกิดจากกระแสไฟฟ้าในขดลวดเพื่อโต้ตอบกับสนามแม่เหล็กของแม่เหล็กถาวรและสร้างสนามแม่เหล็กผ่านขดลวด
ตัวแปร Resultance Resolver: สัญญาณเอาต์พุตเปลี่ยนไปโดยการใช้การเปลี่ยนแปลงของช่องว่างของช่องว่างการฝืนใจและตามหลักการของการเหนี่ยวนำแม่เหล็กไฟฟ้าแรงดันไฟฟ้าเหนี่ยวนำของการเปลี่ยนแปลงที่คดเคี้ยวเอาท์พุทกับมุมการหมุนเชิงกลโดยใช้การเปลี่ยนแปลงช่องว่างอากาศและการเปลี่ยนแปลงของ magnetoresistance
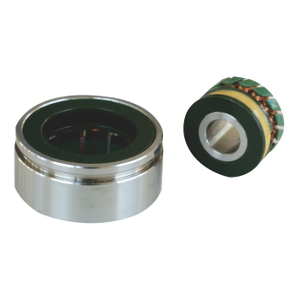
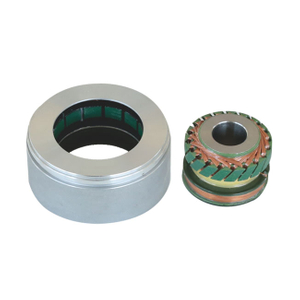
คุณสมบัติเชิงโครงสร้าง
brushless resolver: หลักการของการปฏิรูปของขดลวดแบบกระจายแบบไซนัสโดยทั่วไปมักใช้ในการได้รับในทางทฤษฎีและออกแบบขดลวดสเตเตอร์และใบพัดของโรเตอร์
ตัวแปร Reluctance Resolver: ไม่มีหม้อแปลงการมีเพศสัมพันธ์ไม่มีแปรงไม่มีโครงสร้างการสัมผัสที่มีโครงสร้างง่ายต้นทุนต่ำความต้องการด้านสิ่งแวดล้อมต่ำง่ายต่อการตระหนักถึงการรวมระบบส่งกำลังและอื่น ๆ ทั้งขดลวดกระตุ้นและเอาท์พุทจะถูกวางไว้ในช่องสเตเตอร์ของมอเตอร์และโรเตอร์ประกอบด้วยแผ่นฟันที่เลือกเท่านั้น
ข้อดีและข้อเสีย
brushless resolver: ความแม่นยำสูง แต่โครงสร้างที่ซับซ้อนและต้นทุนที่สูงขึ้น
ตัวแปร Resultance Resolver: โครงสร้างที่เรียบง่ายต้นทุนต่ำความสามารถในการต่อต้านการแทรกแซงที่แข็งแกร่ง แต่ค่อนข้างแม่นยำ
แอปพลิเคชัน
brushless resolver: เนื่องจากความแม่นยำและความน่าเชื่อถือสูงจึงมักใช้ในแอปพลิเคชันที่ต้องการการวัดที่มีความแม่นยำสูง
ตัวแปร Reluctance Resolver: เนื่องจากโครงสร้างที่เรียบง่ายต้นทุนต่ำความสามารถในการต่อต้านการแทรกแซงที่แข็งแกร่งและข้อได้เปรียบอื่น ๆ จึงใช้กันอย่างแพร่หลายในรถจักรยานยนต์ไฟฟ้า, EPS พวงมาลัยเพาเวอร์อิเล็กทรอนิกส์, ระบบ EPS, ระบบ CNC และเขตข้อมูลอื่น ๆ
พารามิเตอร์หลัก
| แบบอย่าง | J36XFW975M |
| คู่เสา | 1 |
| แรงดันไฟฟ้าอินพุต | AC 7 VRMS |
| ความถี่อินพุต | 10,000 Hz |
| อัตราส่วนการเปลี่ยนแปลง | 0.5 ± 10% |
| ความแม่นยำ | สูงสุด± 10 ' |
| การเปลี่ยนเฟส | 0 °± 5 ° |
| ความต้านทานอินพุต | (120 ± 24) Ω |
| ความต้านทานเอาท์พุท | (350 ± 70) Ω |
| ความแข็งแรงของอิเล็กทริก | AC 500 VRMS 1 นาที |
| ความต้านทานฉนวน | 250 MΩนาที |
| ความเร็วในการหมุนสูงสุด | 2543 รอบต่อนาที |
| ช่วงอุณหภูมิการทำงาน | -55 ℃ถึง +155 ℃ |
หลักการทำงาน
brushless resolver: ตำแหน่งมุมของโรเตอร์คำนวณโดยการเปลี่ยนตำแหน่งสัมพัทธ์ระหว่างการคดเคี้ยวของสัญญาณโรเตอร์และการขดลวดกระตุ้นของสเตเตอร์ หลักการทำงานของมันคือการใช้สนามแม่เหล็กที่เกิดจากกระแสไฟฟ้าในขดลวดเพื่อโต้ตอบกับสนามแม่เหล็กของแม่เหล็กถาวรและสร้างสนามแม่เหล็กผ่านขดลวด
ตัวแปร Resultance Resolver: สัญญาณเอาต์พุตเปลี่ยนไปโดยการใช้การเปลี่ยนแปลงของช่องว่างของช่องว่างการฝืนใจและตามหลักการของการเหนี่ยวนำแม่เหล็กไฟฟ้าแรงดันไฟฟ้าเหนี่ยวนำของการเปลี่ยนแปลงที่คดเคี้ยวเอาท์พุทกับมุมการหมุนเชิงกลโดยใช้การเปลี่ยนแปลงช่องว่างอากาศและการเปลี่ยนแปลงของ magnetoresistance
คุณสมบัติเชิงโครงสร้าง
brushless resolver: หลักการของการปฏิรูปของขดลวดแบบกระจายแบบไซนัสโดยทั่วไปมักใช้ในการได้รับในทางทฤษฎีและออกแบบขดลวดสเตเตอร์และใบพัดของโรเตอร์
ตัวแปร Reluctance Resolver: ไม่มีหม้อแปลงการมีเพศสัมพันธ์ไม่มีแปรงไม่มีโครงสร้างการสัมผัสที่มีโครงสร้างง่ายต้นทุนต่ำความต้องการด้านสิ่งแวดล้อมต่ำง่ายต่อการตระหนักถึงการรวมระบบส่งกำลังและอื่น ๆ ทั้งขดลวดกระตุ้นและเอาท์พุทจะถูกวางไว้ในช่องสเตเตอร์ของมอเตอร์และโรเตอร์ประกอบด้วยแผ่นฟันที่เลือกเท่านั้น
ข้อดีและข้อเสีย
brushless resolver: ความแม่นยำสูง แต่โครงสร้างที่ซับซ้อนและต้นทุนที่สูงขึ้น
ตัวแปร Resultance Resolver: โครงสร้างที่เรียบง่ายต้นทุนต่ำความสามารถในการต่อต้านการแทรกแซงที่แข็งแกร่ง แต่ค่อนข้างแม่นยำ
แอปพลิเคชัน
brushless resolver: เนื่องจากความแม่นยำและความน่าเชื่อถือสูงจึงมักใช้ในแอปพลิเคชันที่ต้องการการวัดที่มีความแม่นยำสูง
ตัวแปร Reluctance Resolver: เนื่องจากโครงสร้างที่เรียบง่ายต้นทุนต่ำความสามารถในการต่อต้านการแทรกแซงที่แข็งแกร่งและข้อได้เปรียบอื่น ๆ จึงใช้กันอย่างแพร่หลายในรถจักรยานยนต์ไฟฟ้า, EPS พวงมาลัยเพาเวอร์อิเล็กทรอนิกส์, ระบบ EPS, ระบบ CNC และเขตข้อมูลอื่น ๆ